

将齿轮副与曲柄摇杆机构和摆动导杆机构结合,可以实现复杂的运动传递和转换。这种组合机构常用于需要将旋转运动转换为摆动运动,或者需要精确控制摆动角度和速度的场合。以下是齿轮副连接曲柄摇杆与摆动导杆机构的原理、设计方法和工作过程。
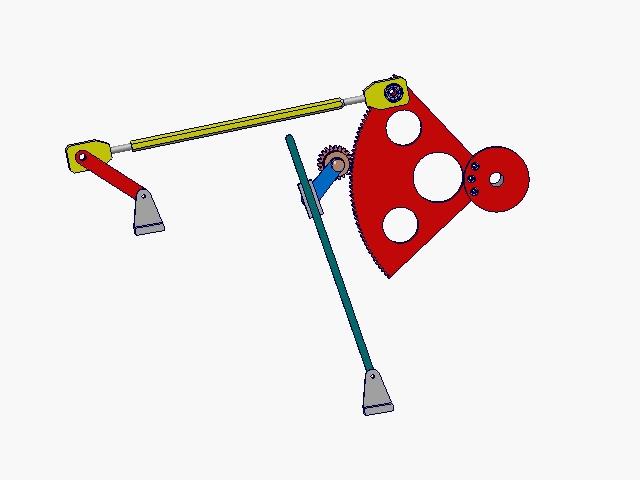
1. 机构组成
- 齿轮副:
- 由两个啮合的齿轮组成,用于传递和转换旋转运动。
- 通常包括一个主动齿轮和一个从动齿轮。
- 曲柄摇杆机构:
- 由曲柄、连杆和摇杆组成,用于将旋转运动转换为摆动运动。
- 摆动导杆机构:
- 由导杆和滑块组成,用于将摆动运动转换为直线运动或特定轨迹的运动。
2. 工作原理
- 输入运动:
- 主动齿轮通过外部动力(如电机)驱动旋转。
- 齿轮副传递运动:
- 主动齿轮带动从动齿轮旋转,实现转速和扭矩的转换。
- 曲柄摇杆机构转换运动:
- 从动齿轮与曲柄固定连接,曲柄的旋转运动通过连杆传递到摇杆,使摇杆产生摆动运动。
- 摆动导杆机构进一步转换运动:
- 摇杆的摆动运动通过导杆传递到滑块,使滑块沿特定轨迹运动。
3. 设计步骤
(1) 确定运动要求
- 输入转速:主动齿轮的转速。
- 输出运动:滑块的行程、速度和加速度。
- 摆动角度:摇杆的摆动范围。
(2) 设计齿轮副
- 传动比:
- 根据输入转速和输出转速要求,确定齿轮的齿数比。
- 传动比 i = frac{Z_2}{Z_1},其中 Z_1 为主动齿轮齿数,Z_2 为从动齿轮齿数。
- 模数:
- 根据负载和转速选择合适的齿轮模数。
(3) 设计曲柄摇杆机构
- 曲柄长度:
- 根据摇杆的摆动角度和滑块的行程确定曲柄长度。
- 连杆长度:
- 根据机构布局和运动要求确定连杆长度。
- 摇杆长度:
- 根据摆动角度和导杆的运动轨迹确定摇杆长度。
(4) 设计摆动导杆机构
- 导杆长度:
- 根据滑块的行程和运动轨迹确定导杆长度。
- 滑块设计:
- 根据负载和运动要求设计滑块的结构和尺寸。
(5) 校核与优化
- 运动学分析:
- 通过几何关系或仿真软件分析机构的运动特性。
- 强度校核:
- 校核齿轮、曲柄、连杆和导杆的强度,确保机构可靠运行。
4. 运动学分析
(1) 齿轮副运动
- 主动齿轮角速度 omega_1,从动齿轮角速度 omega_2:omega_2 = frac{Z_1}{Z_2} omega_1
(2) 曲柄摇杆机构运动
- 曲柄长度 r,连杆长度 l,摇杆长度 R。
- 摇杆的摆动角度 theta 与曲柄的旋转角度 phi 的关系:theta = arcsinleft(frac{r sin phi}{l}right)
(3) 摆动导杆机构运动
- 滑块的位移 s 与摇杆的摆动角度 theta 的关系:s = R sin theta
5. 应用实例
- 包装机械:
- 用于将旋转运动转换为精确的摆动运动,实现物料的推送或分拣。
- 自动化生产线:
- 用于工件的间歇性输送和定位。
- 印刷机械:
- 用于纸张的间歇性进给。
6. 设计注意事项
- 齿轮啮合精度:
- 确保齿轮啮合平稳,避免冲击和噪音。
- 运动平稳性:
- 在摆动运动的起始和终止阶段,设计缓冲装置以减少冲击。
- 负载匹配:
- 根据负载大小选择合适的齿轮、曲柄和连杆材料。
- 润滑与维护:
- 定期润滑齿轮和运动部件,确保机构长期稳定运行。
声明:
1.本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部作品的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
2.为保护部分资料著作权益,此部分文档设置为VIP用户积分下载,本站未开通任何积分获取方式,即此部分文档无任何获取渠道,仅用于团队内部交流学习,无任何商业用途。
3.文档下载类资源,如您取得权限并下载后发现资源存在问题,请添加官方客服微信处理,以保障您的权益。
1.本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部作品的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
2.为保护部分资料著作权益,此部分文档设置为VIP用户积分下载,本站未开通任何积分获取方式,即此部分文档无任何获取渠道,仅用于团队内部交流学习,无任何商业用途。
3.文档下载类资源,如您取得权限并下载后发现资源存在问题,请添加官方客服微信处理,以保障您的权益。


