

差动轮系(同向)的工作原理基于行星齿轮机构的运动合成,通过两个同方向旋转的输入轴驱动,实现动力的合成或分配。以下是其详细工作原理:
一、差动轮系的基本结构
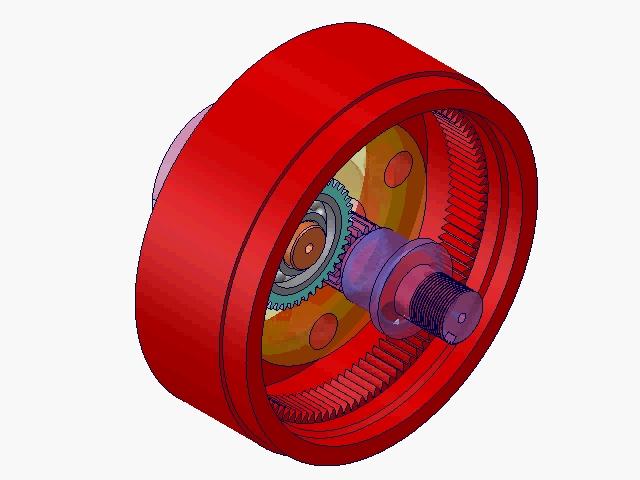
差动轮系由以下核心部件组成:
- 太阳轮(Sun Gear):位于中心,通常连接一个输入轴。
- 行星轮(Planet Gears):围绕太阳轮啮合,安装在行星架上。
- 行星架(Planet Carrier):支撑行星轮,可作为输入或输出。
- 内齿圈(Ring Gear):外圈齿轮,通常连接另一个输入轴或输出轴。
二、同向工作的运动学关系
当两个输入轴以相同方向旋转时,差动轮系的运动满足以下方程:
omega_s + k cdot omega_r = (1 + k) cdot omega_c
其中:
- omega_s:太阳轮角速度
- omega_r:内齿圈角速度
- omega_c:行星架角速度
- k = frac{Z_r}{Z_s}(内齿圈齿数 Z_r 与太阳轮齿数 Z_s 之比)
三、同向工作模式分析
1. 双输入驱动行星架输出
- 输入:太阳轮(omega_s)与内齿圈(omega_r)同向旋转。
- 输出:行星架(omega_c)合成两者的运动。
- 示例:
- 若 omega_s = 100 , text{rpm},omega_r = 50 , text{rpm},k = 2:
omega_c = frac{100 + 2 times 50}{1 + 2} = frac{200}{3} approx 66.7 , text{rpm}
- 输出方向:与输入同向(顺时针或逆时针)。
2. 行星架输入驱动双输出
- 输入:行星架(omega_c)驱动。
- 输出:太阳轮(omega_s)与内齿圈(omega_r)同向旋转,但转速不同。
- 示例:
- 若 omega_c = 60 , text{rpm},k = 3,固定太阳轮(omega_s = 0):
0 + 3 cdot omega_r = 4 cdot 60 Rightarrow omega_r = 80 , text{rpm}
- 输出方向:内齿圈与行星架同向。
四、应用场景
- 汽车差速器
- 左右车轮同向旋转,但允许转速差(如转弯时)。
- 行星架由传动轴驱动,太阳轮和内齿圈分别连接左右车轮。
- 混合动力系统
- 发动机与电机同向驱动行星架,合成动力输出到车轮。
- 机床变速机构
- 通过调节两输入轴的转速,实现无级变速输出。
五、关键特性
- 同向转速合成
- 输出转速为两输入的加权平均,方向一致。
- 扭矩分配
- 输入扭矩按齿数比分配到太阳轮和内齿圈:
T_s : T_r = 1 : k
- 功率流平衡
- 满足 T_s omega_s + T_r omega_r = T_c omega_c,确保能量守恒。
六、总结
差动轮系(同向)通过行星齿轮的啮合关系,将两个同向旋转的输入合成为一个输出,或反向分配动力。其核心在于运动方程的线性组合,适用于需动态调节转速或扭矩的机械系统,具有结构紧凑、效率高的特点。
声明:
1.本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部作品的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
2.为保护部分资料著作权益,此部分文档设置为VIP用户积分下载,本站未开通任何积分获取方式,即此部分文档无任何获取渠道,仅用于团队内部交流学习,无任何商业用途。
3.文档下载类资源,如您取得权限并下载后发现资源存在问题,请添加官方客服微信处理,以保障您的权益。
1.本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部作品的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
2.为保护部分资料著作权益,此部分文档设置为VIP用户积分下载,本站未开通任何积分获取方式,即此部分文档无任何获取渠道,仅用于团队内部交流学习,无任何商业用途。
3.文档下载类资源,如您取得权限并下载后发现资源存在问题,请添加官方客服微信处理,以保障您的权益。

