

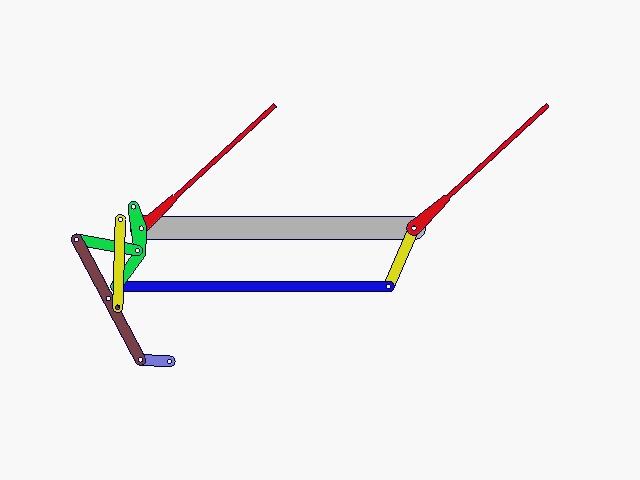
一、四杆机构基本构成
四杆机构由以下四部分组成:
- 机架(固定杆):固定不动的部分(杆1)
- 曲柄(主动杆):绕机架旋转的杆件(杆2)
- 连杆(连接杆):传递运动的中间杆(杆3)
- 摇杆(从动杆):绕机架摆动的杆件(杆4)
二、连杆4不作用的常见原因
1. 杆长比例不满足曲柄存在条件
- 问题表现:当杆4长度不满足条件时,机构无法形成连续旋转,导致杆4无法摆动。
- 判定条件(格拉斯霍夫定理):\text{最短杆 + 最长杆} \leq \text{其余两杆之和}
- 若杆4为最长杆且不满足条件,机构变为双摇杆机构,无法运动。
2. 运动副卡死
- 问题表现:铰链点(如杆4与机架的连接点)因生锈、变形或装配误差导致无法转动。
- 检查方法:手动旋转曲柄,观察杆4铰链是否灵活。
3. 外力干扰
- 问题表现:杆4受到外部阻力(如摩擦、负载过大)导致停摆。
- 案例:输送机构中杆4因物料堆积被卡住。
三、解决方案
1. 调整杆长比例
- 若杆4为摇杆,需满足:l_{\text{杆2}} + l_{\text{杆4}} \leq l_{\text{杆1}} + l_{\text{杆3}}
- 修改建议:缩短杆4或加长杆1/杆3。
2. 优化运动副
- 使用润滑剂或更换轴承。
- 检查铰链孔的同轴度公差(建议≤0.05mm)。
3. 动态仿真验证
使用Adams或SolidWorks Motion进行运动学仿真,观察杆4的受力与运动轨迹:
四、实际案例分析
案例背景:某包装机械的四杆推送机构中,杆4无法推动物料。
问题诊断:
- 杆长比例:杆1=200mm,杆2=80mm,杆3=150mm,杆4=180mm
- 验证:80 + 180 = 260 > 200 + 150 = 350 → 不满足格拉斯霍夫条件
解决方案:将杆4缩短至170mm,重新装配后机构恢复正常。
五、维护建议
- 定期润滑:每500小时对铰链点加注锂基润滑脂。
- 负载监控:在杆4安装应力传感器,设定阈值报警。
- 预防性检查:每季度检查杆件直线度(公差≤0.1mm/m)。
通过以上分析,可系统解决四杆机构中连杆4不作用的问题。实际应用中需结合动态仿真与实测数据优化设计。
声明:
1.本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部作品的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
2.为保护部分资料著作权益,此部分文档设置为VIP用户积分下载,本站未开通任何积分获取方式,即此部分文档无任何获取渠道,仅用于团队内部交流学习,无任何商业用途。
3.文档下载类资源,如您取得权限并下载后发现资源存在问题,请添加官方客服微信处理,以保障您的权益。
1.本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部作品的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
2.为保护部分资料著作权益,此部分文档设置为VIP用户积分下载,本站未开通任何积分获取方式,即此部分文档无任何获取渠道,仅用于团队内部交流学习,无任何商业用途。
3.文档下载类资源,如您取得权限并下载后发现资源存在问题,请添加官方客服微信处理,以保障您的权益。

