

在机械或工程结构中,“D点不连接”通常指在特定设计中有意或意外地断开某个关键连接点(D点),从而改变系统的力学特性或运动传递方式。以下是分场景的原理分析及影响:
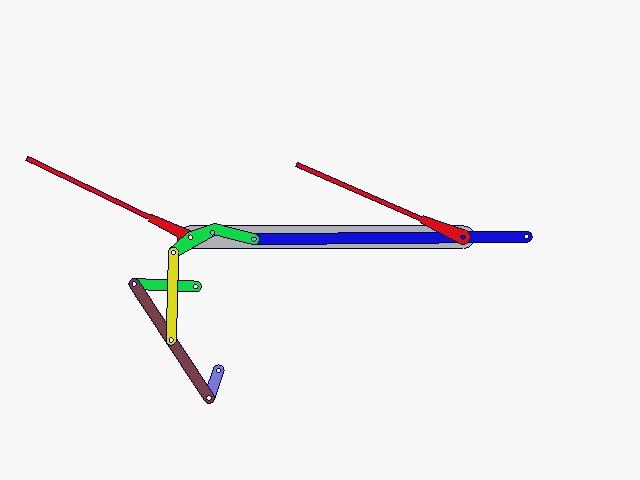
一、四杆机构中的D点不连接
假设D点为四杆机构的铰接点之一(如摇杆与机架的连接点):
原理变化:
- 机构类型转变:
- 原本的四杆机构(曲柄摇杆/双曲柄/双摇杆)退化为 三杆链,失去完整运动副约束。
- 自由度计算:F = 3n – 2P_L – P_H = 3 \times 3 – 2 \times 4 = 1 \quad (\text{实际无效,因结构不闭合})→ 系统变为 非约束机构,无法传递规律运动。
- 运动特性影响:
- 摇杆(原D点)失效:无法将曲柄的旋转转换为摆动。
- 能量传递中断:动力无法通过D点传递至下游机构。
二、桁架结构中的D点不连接
假设D点为桁架的关键节点(如桥梁桁架的连接点):
力学影响:
- 静不定度降低:
- 原静定桁架可能变为 几何可变体系,失去承载能力。
- 内力重分布:相邻杆件承受额外应力,易导致失稳。
- 典型破坏形式:
- 局部坍塌:D点连接的杆件失去支撑,引发连锁破坏。
- 整体屈曲:结构刚度下降,在荷载下发生整体变形。
四、解决方案
1. 机械系统修复
- 重新约束:修复D点连接,恢复运动副完整性。
- 冗余设计:增加辅助连杆(如五杆机构)提升可靠性。
2. 结构补强
- 局部加固:在D点周围焊接加强板或增加斜撑。
- 动态监测:安装应变传感器实时监测应力集中。
五、工程应用案例
案例:汽车雨刮器四杆机构D点(摇杆铰链)因锈蚀断开。
后果:
- 雨刮臂无法摆动,电机空转烧毁。
解决方案: - 更换不锈钢铰链并涂抹防水润滑脂。
- 增加霍尔传感器监测摇杆实际位置。
通过针对性分析D点不连接的原理,可快速定位故障并制定修复策略。实际应用中需结合仿真工具(如ADAMS、ANSYS)验证结构完整性。
声明:
1.本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部作品的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
2.因技术有限,无法一一与原作者取得联系,如您是资源作者并觉得本站宣传有损于您的著作权,请及时联系我们删除!。
3.版权作品不对外公开,且无任何商业用途,仅用于团队内部人员学习交流;如因技术错误导致的可供下载,非我们的本意,我们会积极配合纠正。
4.部分作品,如您取得权限并下载后发现资源存在问题,请添加官方客服微信处理,以保障您的权益。
1.本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部作品的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
2.因技术有限,无法一一与原作者取得联系,如您是资源作者并觉得本站宣传有损于您的著作权,请及时联系我们删除!。
3.版权作品不对外公开,且无任何商业用途,仅用于团队内部人员学习交流;如因技术错误导致的可供下载,非我们的本意,我们会积极配合纠正。
4.部分作品,如您取得权限并下载后发现资源存在问题,请添加官方客服微信处理,以保障您的权益。



