







-
 下载1个资源
下载1个资源砂箱翻箱机构动图(砂箱翻箱机构设计及应用)
砂箱翻箱机构是铸造生产线中用于翻转砂箱(型砂模具)以完成造型、合箱、脱模等工序的关键设备。其核心功能是安全、高效地实现砂箱的180°或特定角度翻转,同时避免型砂脱落或砂箱变形。以下是其详细解析: 1. 基本类型与结构 (1)按驱动方式分类 液压驱动: 采用液压缸推动翻转臂,动力大、运行平稳,适用于大型砂箱(如汽车铸件)。 特点:需配备液压站,维护复杂但承载能力强。 电动驱动: 通过电机+减速机驱动…- 0
- 0
- 3
-
 下载1个资源
下载1个资源用齿轮副连接曲柄摇杆与摆动导杆机构动图(原理图)
将齿轮副与曲柄摇杆机构和摆动导杆机构结合,可以实现复杂的运动传递和转换。这种组合机构常用于需要将旋转运动转换为摆动运动,或者需要精确控制摆动角度和速度的场合。以下是齿轮副连接曲柄摇杆与摆动导杆机构的原理、设计方法和工作过程。 1. 机构组成 齿轮副: 由两个啮合的齿轮组成,用于传递和转换旋转运动。 通常包括一个主动齿轮和一个从动齿轮。 曲柄摇杆机构: 由曲柄、连杆和摇杆组成,用于将旋转运动转换为摆…- 0
- 0
- 52
-
 下载1个资源
下载1个资源搅拌撒草机构机械设计动图(原理图)
搅拌撒草机构是一种用于农业机械(如撒肥机、饲料搅拌车等)的装置,主要用于将草料、肥料或其他松散物料进行搅拌并均匀撒布。以下是搅拌撒草机构的原理、组成和工作方式的详细介绍。 1. 搅拌撒草机构的基本组成 搅拌撒草机构通常由以下部分组成: 搅拌装置: 用于将草料或肥料搅拌均匀。 常见形式:螺旋搅拌器、桨叶搅拌器。 撒布装置: 用于将搅拌后的物料均匀撒布。 常见形式:旋转撒布盘、抛撒器。 传动系统: 将…- 0
- 0
- 9
-
 下载1个资源
下载1个资源螺旋齿轮啮合动图(螺旋齿轮啮合工作原理及应用)
螺旋齿轮啮合的工作原理基于其独特的螺旋齿形设计,以下是其核心机制及特点的详细分步解释: 1. 螺旋齿形的核心作用 渐入渐出的啮合过程:螺旋齿轮的齿呈螺旋状倾斜于齿轮轴线。啮合时,齿的接触并非瞬间全齿宽接触,而是从齿的一端逐渐扩展到另一端。这种设计使得载荷分布更均匀,减少了冲击和振动。 高重合度:由于螺旋齿的倾斜,多个齿会同时参与啮合(通常重合度大于直齿轮的1-2)。例如,螺旋齿轮的重合度可达2-4…- 0
- 0
- 27
-
 下载1个资源
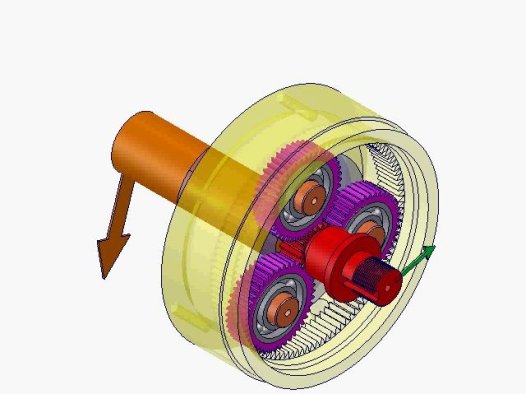
下载1个资源实际设计的行星齿轮机构动图(原理图)
行星齿轮机构(Planetary Gear Mechanism)是一种常见的齿轮传动系统,因其结构紧凑、传动效率高、承载能力强等特点,广泛应用于汽车、风力发电、工业机械等领域。以下是行星齿轮机构的原理、组成和工作方式的详细介绍。 1. 行星齿轮机构的基本组成 行星齿轮机构主要由以下部分组成: 太阳轮(Sun Gear): 位于机构中心,通常为输入轴。 行星轮(Planet Gears): 围绕太阳…- 0
- 0
- 33
-
 下载1个资源
下载1个资源齿轮啮合机构动图(齿轮啮合机构工作原理)
齿轮啮合机构是机械传动中最核心的动力传递方式之一,通过两个或多个齿轮的齿面直接接触,实现运动形式、速度、扭矩或方向的转换。以下是其详细工作原理: 1. 基本组成 主动齿轮(驱动轮):输入动力,带动从动齿轮旋转。 从动齿轮(被动轮):接受主动齿轮传递的运动和力。 齿轮轴:支撑齿轮并传递扭矩。 机架(箱体):固定齿轮轴,保证啮合精度。 2. 核心工作原理 (1)啮合基本条件 模数(Module)相同:…- 0
- 0
- 13
-
 下载1个资源
下载1个资源卸料小车挡板自动开启装置动图及设计选型优化
卸料小车(如矿用、冶金、化工等场景)的挡板自动开启装置用于精准控制物料卸料位置,确保高效、安全作业。其核心要求包括可靠性、自动化程度、适应恶劣环境。以下是系统化的设计方案: 1. 常见挡板开启方式与选型 (1)按驱动方式分类 类型 原理 适用场景 优缺点 液压驱动 液压缸推动挡板开闭,推力大、速度可调。 重型物料(矿石、煤炭) ✅高负载;❌需液压站,维护复杂。 气动驱动 气缸动作,响应快、清洁。 …- 0
- 0
- 7
-
 下载1个资源
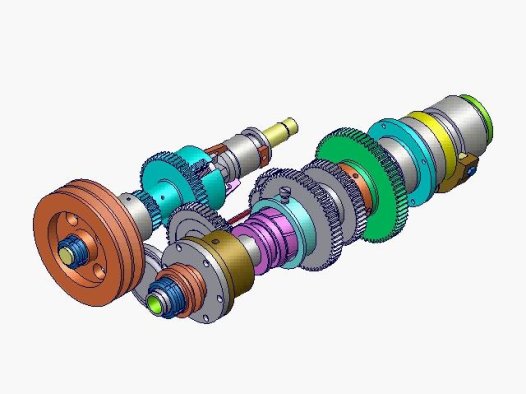
下载1个资源定轴轮系机构动图(定轴轮系设计原理及优化)
1. 定义 定轴轮系是齿轮传动的一种形式,其特点是所有齿轮的轴线位置在传动过程中均保持固定,不绕其他轴线转动。与行星轮系(动轴轮系)不同,定轴轮系中每个齿轮仅绕自身轴线旋转。 2. 组成与特点 组成:由多个齿轮副(圆柱齿轮、锥齿轮、蜗轮蜗杆等)串联而成。 特点: 结构简单,轴线固定,易于制造和安装。 传动效率高(通常可达95%以上)。 传动比稳定,适用于精确传动场合。 可通过惰轮改变转向,但不影响…- 0
- 0
- 63
-
 下载1个资源
下载1个资源人字齿轮传动机构动图(人字齿轮传动机构工作原理)
人字齿轮(Herringbone Gear/Double Helical Gear)是一种特殊设计的斜齿轮,通过将两个旋向相反的斜齿轮组合成一体,完美解决了普通斜齿轮轴向力大的问题,同时保留了斜齿轮传动平稳、高承载能力的优势。以下是其详细工作原理: 1. 基本组成 人字齿轮本体:由左旋和右旋斜齿轮对称组合而成,形似"人"字。 齿轮轴:采用高强度合金钢,确保轴向定位精度。 专用轴…- 0
- 0
- 5
-
 下载1个资源
下载1个资源皮革抛光机设计动图(皮革抛光机工作原理)
皮革抛光机的工作原理主要基于机械摩擦和热量作用,具体如下: 1. 机械摩擦 抛光轮:通常由布、毛毡或皮革制成,高速旋转时与皮革表面接触,通过摩擦去除粗糙部分。 抛光剂:使用蜡、油或化合物,涂抹在抛光轮或皮革上,增强抛光效果。 2. 热量作用 摩擦生热:高速旋转的抛光轮与皮革摩擦产生热量,软化皮革表面,使其更易抛光。 热量辅助:热量有助于抛光剂渗透,提升光泽和平滑度。 3. 操作步骤 预处理:清洁皮…- 0
- 0
- 11
-
 下载1个资源
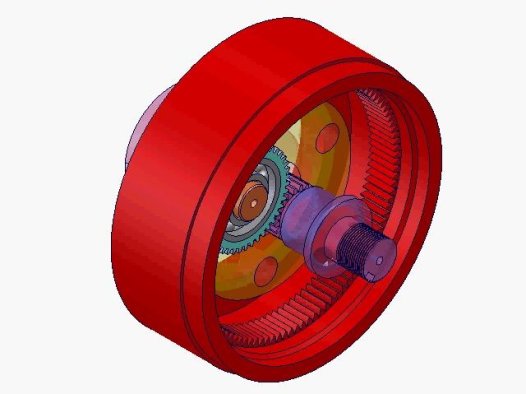
下载1个资源差动轮系(同向)动图(差动轮系工作原理)
差动轮系(同向)的工作原理基于行星齿轮机构的运动合成,通过两个同方向旋转的输入轴驱动,实现动力的合成或分配。以下是其详细工作原理: 一、差动轮系的基本结构 差动轮系由以下核心部件组成: 太阳轮(Sun Gear):位于中心,通常连接一个输入轴。 行星轮(Planet Gears):围绕太阳轮啮合,安装在行星架上。 行星架(Planet Carrier):支撑行星轮,可作为输入或输出。…- 0
- 0
- 87
-
 下载1个资源
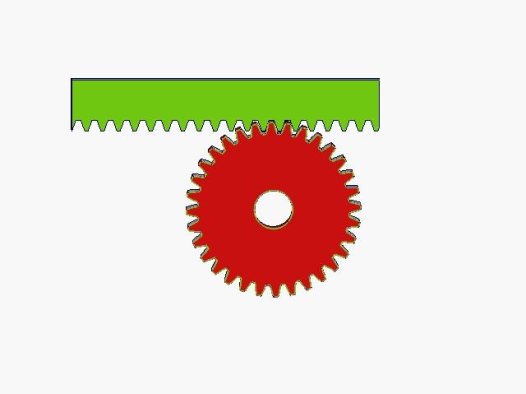
下载1个资源齿轮齿条啮合机构动图(齿轮齿条啮合设计原理及优化)
齿轮齿条啮合是一种将旋转运动转换为直线运动(或反之)的高效传动方式,广泛应用于机床、自动化设备、汽车转向系统等领域。以下是其设计原理、关键参数及优化策略的详细说明: 一、基本参数与几何关系 模数(mm) 齿轮与齿条的模数必须一致,决定齿的大小,常用标准模数:1, 1.5, 2, 2.5, 3 mm等。 模数选择公式:m \geq \sqrt[3]{\frac{2T}{\psi_d \cdot \s…- 0
- 0
- 37
-
 下载1个资源
下载1个资源锥齿轮传动动图(锥齿轮传动原理及设计要点)
锥齿轮(伞齿轮)传动是一种用于传递相交轴间动力和运动的机械传动方式,尤其适用于两轴垂直相交(90°)的工况。以下是其核心原理、设计要点及典型应用的详细解析: 一、锥齿轮传动基础原理 1. 几何关系 轴交角:通常为90°,也可设计为其他角度(如60°、120°)。 节锥角: 两齿轮节锥角之和等于轴交角:\delta_1 + \delta_2 = \Sigmaδ1+δ2=Σ 当轴交角Σ=90°时,…- 0
- 0
- 25
-
 下载1个资源
下载1个资源圆柱凸轮机构动图(圆柱凸轮机构工作原理及应用)
圆柱凸轮机构是一种通过圆柱形凸轮的旋转运动驱动从动件实现精确直线或摆动输出的机械装置。其核心由圆柱凸轮(表面刻有闭合或开放的三维曲线凹槽)和从动件(通常为滚子或平底结构)组成。当凸轮绕轴线旋转时,凹槽的轮廓迫使从动件沿轴向或周向移动,将旋转输入转化为特定运动轨迹。得益于圆柱结构的空间布局能力,该机构可实现多自由度动作,适用于大行程、复杂轨迹或同步控制场景(如机床分度、自动化装配线),具有高承载、低…- 0
- 0
- 14
-
 下载1个资源
下载1个资源导杆的合成运动动图(导杆的合成运动工作原理)
导杆机构的合成运动工作原理通常涉及两个或多个简单运动的组合(如直线运动与摆动、旋转与平移等),最终实现特定的机械输出。以下是其典型工作原理的分解: 1. 基本组成 导杆机构通常由以下部件构成: 导杆(Sliding Bar):可在固定轨道或套筒中滑动或摆动。 曲柄(Crank)或输入连杆:提供旋转或往复输入动力。 滑块(Slider)或滚子:连接导杆与其他部件,减少摩擦。 固定导轨:约束导杆的运动…- 0
- 0
- 10
-
 下载1个资源
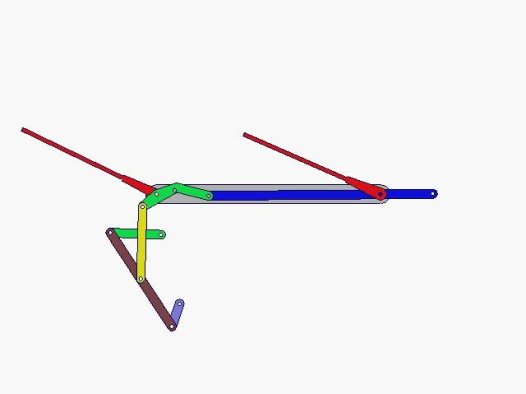
下载1个资源前轮转向机构动图(前轮转向机构设计及应用)
前轮转向机构是车辆(汽车、叉车、农机等)的核心系统,用于控制行驶方向,确保灵活性和稳定性。其设计需兼顾转向力传递、车轮定位、回正性能等关键因素。以下是详细解析: 1. 基本类型与结构 (1)机械转向系统(无助力) 齿轮齿条式(最常见) 组成:方向盘→转向柱→齿轮齿条→横拉杆→转向节→车轮。 特点:结构简单、成本低,用于小型车或经济型车辆。 缺点:转向力完全依赖驾驶员,低速时操作费力。 循环球式(重…- 0
- 0
- 10
-
 下载1个资源
下载1个资源用平行四杆作同步带涨紧机构动图(设计思路及注意事项)
使用平行四杆机构作为同步带涨紧机构是一种巧妙的设计方法,能够实现稳定的张紧力并适应皮带磨损或拉伸后的自动补偿。以下是详细的设计思路和注意事项: 1. 平行四杆涨紧机构原理 平行四杆特性:由四根连杆组成的平行四边形结构,对边始终保持平行,运动时整体保持平移。 涨紧应用:将其中一个杆作为可调基座,另一平行杆安装张紧轮,通过弹簧或螺纹调节基座位置,使张紧轮同步移动,保持皮带张力。 2. 设计步骤 (1)…- 0
- 0
- 2
-
 下载1个资源
下载1个资源六组平行四杆机构动图(六组平行四杆机构设计与系统分析)
六组平行四杆机构的组合设计可以显著提升推送能力、扩大工作范围或实现同步多工位操作,适用于大型物料、高负载或复杂运动场景。以下是针对这一设计的系统解析: 1. 六组并联的应用场景 大型物料推送:如汽车焊接线上的车身部件转运。 高精度同步:电子装配线上多点同步夹持电路板。 分布式负载:重型包装箱的平衡推送,避免单点受力变形。 复杂轨迹:通过差异化驱动实现曲线或阶梯式推送(需协同控制)。 2. 典型结构…- 0
- 0
- 5
-
 下载1个资源
下载1个资源四杆机构D点不连接动图(D点不连接原理及影响)
在机械或工程结构中,“D点不连接”通常指在特定设计中有意或意外地断开某个关键连接点(D点),从而改变系统的力学特性或运动传递方式。以下是分场景的原理分析及影响: 一、四杆机构中的D点不连接 假设D点为四杆机构的铰接点之一(如摇杆与机架的连接点): 原理变化: 机构类型转变: 原本的四杆机构(曲柄摇杆/双曲柄/双摇杆)退化为 三杆链,失去完整运动副约束。 自由度计算:F = 3n - 2P_L - …- 0
- 0
- 9
-
 下载1个资源
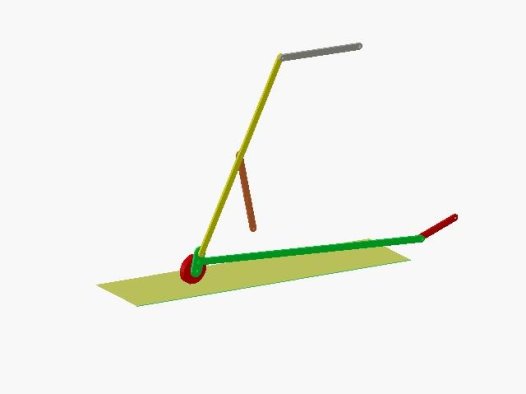
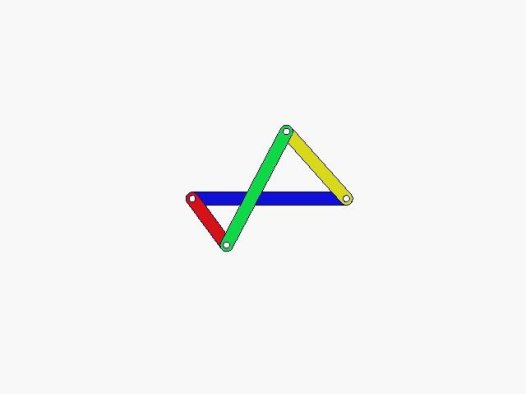
下载1个资源曲柄摇杆机构动图(原理图)
曲柄摇杆机构是一种常见的机械传动装置,通常用于将旋转运动转换为往复运动,或反之。它由曲柄、连杆和摇杆组成,广泛应用于发动机、泵、压缩机等设备中。 曲柄摇杆机构工作原理: 曲柄:固定在旋转轴上,随着轴的旋转做圆周运动。 连杆:连接曲柄和摇杆,将曲柄的旋转运动传递给摇杆。 摇杆:通常固定在一端,另一端随连杆的运动做往复摆动。 当曲柄旋转时,通过连杆带动摇杆摆动,实现旋转与往复运动的转换。- 0
- 0
- 253




















扫码打开当前页

客服微信

微信服务号

抖音号
-
¥优惠劵使用时效:无法使用使用时效:
之前
使用时效:永久有效优惠劵ID:×