

划桨机构是一种将旋转运动转换为往复摆动或直线运动的机械装置,广泛应用于船舶推进、划船机、仿生机器人等领域。以下是划桨机构的核心设计原理、典型结构及优化方法:
一、划桨机构的核心原理
- 运动转换
- 输入:曲柄或电机的连续旋转运动
- 输出:桨叶的周期性摆动或直线往复运动
- 力学特性
- 划桨轨迹需满足 入水低阻力、出水高推进效率
- 桨叶角度与水流的动态匹配(攻角优化)
二、典型划桨机构类型
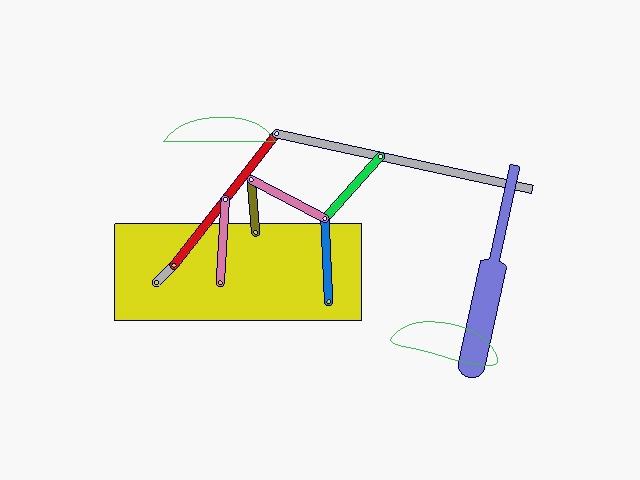
1. 四连杆划桨机构
- 结构组成:曲柄(AB)、连杆(BC)、摇杆(CD)、机架(AD)
- 运动分析:
- 曲柄AB匀速旋转 → 摇杆CD往复摆动 → 桨叶固定于D点
- 轨迹方程(极坐标):\theta_D
- 特点:结构简单,但桨叶轨迹固定,适用于小型船只。
2. 曲柄滑块机构
- 结构组成:曲柄(OA)、连杆(AB)、滑块(B)
- 运动分析:
- 曲柄OA旋转 → 滑块B直线往复 → 桨柄与滑块铰接
- 滑块位移方程:x_B = l_{OA}\cos\theta + \sqrt{l_{AB}^2 – (l_{OA}\sin\theta)^2}
- 特点:可实现直线划桨,推进力大,常见于划船机。
3. 空间四杆机构(球面副)
- 结构组成:三维空间连杆 + 球铰链
- 应用场景:仿生机器鱼尾鳍驱动、多自由度划桨
- 优势:可模拟生物划桨的复杂三维轨迹。
三、关键设计参数
| 参数 | 影响 | 推荐范围 |
|---|---|---|
| 曲柄长度 l_{OA} | 决定行程长度 | 50-200mm(依负载调整) |
| 连杆长度 l_{AB} | 影响力学增益与轨迹形状 | l_{AB} \geq 2l_{OA} |
| 桨叶面积 A | 推进力 F \propto \rho v^2 A C_L | 0.1-0.5m²(水介质) |
| 划桨频率 f | 功率 P \propto F \cdot v | 0.5-2Hz(人力驱动) |
四、动力学优化方法
- 轨迹优化
- 目标函数:最大化推进效率 \eta = \frac{F_{\text{推进}} \cdot v}{P_{\text{输入}}}
- 约束条件:
- 入水角 \alpha_{\text{entry}} \leq 30^\circ(减少溅射)
- 出水角 \alpha_{\text{exit}} \geq 60^\circ(快速脱离水流)
- 惯性补偿设计
- 添加飞轮或配重块,平衡机构在死点位置的惯性冲击。
- 转动惯量匹配:J_{\text{flywheel}} = \frac{T_{\text{peak}}}{4\pi^2 f^2 \Delta\theta}
- 材料选择
- 桨叶:碳纤维复合材料(比强度高,耐腐蚀)
- 铰链副:不锈钢轴套 + PTFE衬套(低摩擦,防水)
五、典型应用案例
- 赛艇双桨机构
- 结构:双侧对称四连杆机构
- 特点:桨频可达 40次/分钟,推进效率>85%
- 专利技术:可调桨叶攻角机构(US Patent 9,840,218)
- 仿生机器鱼尾鳍驱动
- 结构:空间四杆机构 + 柔性尾鳍
- 性能:游速 1.2m/s,效率比螺旋桨高 30%
六、常见问题与解决方案
| 问题 | 原因 | 解决方案 |
|---|---|---|
| 划桨卡死 | 死点位置无通过性 | 设计非对称连杆长度 |
| 推进力波动大 | 惯性力不均衡 | 增加飞轮或优化质量分布 |
| 铰链磨损快 | 水介质腐蚀+高负载 | 改用陶瓷轴承+定期润滑 |
七、仿真与测试工具
- 运动学仿真:ADAMS、SolidWorks Motion
- 验证轨迹是否满足 \alpha_{\text{entry}}、\alpha_{\text{exit}} 要求
- 流体仿真:ANSYS Fluent、OpenFOAM
- 优化桨叶形状(NACA翼型 vs 平板)
- 原型测试:
- 六维力传感器:测量推进力/阻力
- 高速摄影:捕捉入水-出水过程
通过合理选择机构类型、优化动力学参数并结合仿真验证,可设计出高效可靠的划桨机构。实际应用中需重点平衡 机械效率、结构强度 和 环境适应性。
声明:
本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部内容的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部内容的准确性、完整性,也不构成采购意见,线下交易请自行甄别。


