

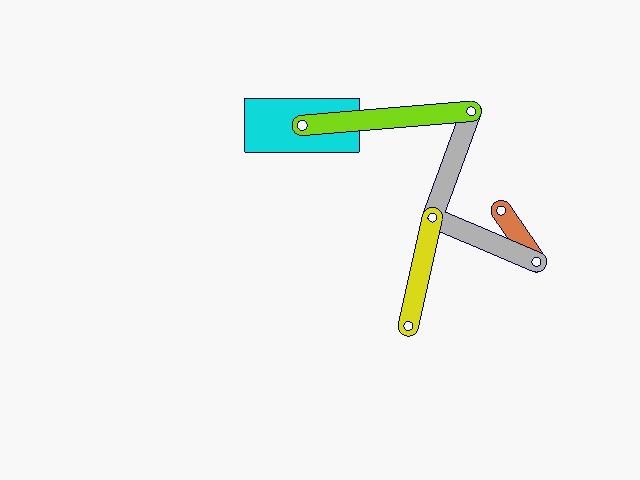
以下是关于曲柄摇杆与摇杆滑块串接机构(Crank-Rocker + Rocker-Slider Compound Mechanism)的详细分析,包含运动学推导、设计要点及典型应用案例:
graph LR
A[曲柄] --> B[摇杆]
B --> C[滑块]- 输入:曲柄匀速旋转(通常由电机驱动)
- 中间转换:摇杆将旋转运动转换为摆动
- 输出:滑块在导轨上做直线往复运动
二、运动学分析
1. 曲柄摇杆部分
- 参数定义:
- 曲柄长度 l_1
- 连杆长度 l_2
- 摇杆长度 l_3
- 机架长度 l_4
- 曲柄转角 \theta
- 摇杆摆角 \phi:\phi = 2 \arctan\left( \frac{-B \pm \sqrt{B^2 – 4AC{2A} \right)其中:A = l_4 – l_1 \cos\theta – l_3 \cos\alpha \\ B = -2 l_1 l_3 \sin\theta \\ C = l_4^2 + l_1^2 + l_3^2 – l_2^2 – 2 l_1 l_4 \cos\theta
2. 摇杆滑块部分
- 参数定义:
- 摇杆长度 l_3
- 滑块导轨倾角 \beta
- 摇杆摆角 \phi
- 滑块位移 s:s = l_3 \cos(\phi – \beta) – \sqrt{l_3^2 \sin^2(\phi – \beta) + e^2}(e 为导轨偏置距,当导轨垂直于摇杆摆动平面时 e = 0)
三、关键设计参数优化
| 参数 | 设计目标 | 推荐比例 |
|---|---|---|
| 曲柄长度 l_1 | 控制滑块行程范围 | l_1 : l_3 = 1:3 \sim 1:5 |
| 摇杆长度 l_3 | 平衡力矩与滑块速度 | l_3 > 2.5 l_1 |
| 导轨倾角 \beta | 调节滑块运动方向与力学特性 | \beta = 0^\circ \sim 30^\circ |
| 连杆比 \lambda = l_2/l_1 | 避免死点并减小惯性力 | \lambda = 2.5 \sim 4 |
四、动力学特性
- 速度分析:
- 滑块最大速度出现在摇杆摆角中点:v_{max} = \omega l_1 \left( \frac{l_3}{l_4} \right) \sin\theta_{mid}
- 惯性力补偿:
- 推荐在曲柄添加配重块,质量 m 满足:m r \omega^2 = 0.6 F_{inertia\_slider}
五、典型应用案例
案例1:自动冲压机
- 参数:
- 曲柄 l_1 = 50mm
- 摇杆 l_3 = 200mm
- 冲压力 F = 5kN
- 特性:
- 滑块行程 S = 120mm
- 冲压频率 f = 60次/分钟
- 采用淬火钢导轨,硬度 HRC58-62
案例2:包装机械推料机构
- 优化点:
- 导轨倾角 \beta = 15^\circ(减少物料卡滞)
- 添加聚氨酯缓冲垫(吸收回程冲击)
六、常见问题与对策
| 故障现象 | 原因分析 | 解决方案 |
|---|---|---|
| 滑块卡死 | 死点位置无通过性 | 调整 l_2/l_1 至>2.5 |
| 导轨异常磨损 | 侧向力过大 | 增加直线轴承,降低 \beta 角 |
| 振动噪声大 | 惯性力不平衡 | 曲柄添加配重,优化 m \cdot r |
七、ADAMS仿真步骤
- 建立曲柄-摇杆-滑块三维模型
- 定义旋转副(曲柄-机架)、转动副(摇杆-连杆)、移动副(滑块-导轨)
- 施加电机驱动 \omega = 60rpm
- 测量滑块位移/速度/加速度曲线
- 优化杆长参数使 a_{max} \leq 15m/s^2
八、进阶设计建议
- 变行程设计:
- 在摇杆上设置可调铰点(l_3 可变)
- 柔性连接:
- 滑块与执行端间加入弹簧阻尼系统(刚度 k = 100N/mm)
- 智能控制:
- 通过伺服电机实现 \omega 可变,适应负载变化
该组合机构通过两级运动转换,兼具曲柄摇杆的可靠性与滑块机构的直线输出优势,特别适用于需要中长行程、可控终点位置的工业场景。设计中需重点校核摇杆支点的疲劳强度(推荐使用有限元分析验证 \sigma_{max} \leq 0.5\sigma_y)。
声明:
1.本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部作品的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
2.为保护部分资料著作权益,此部分文档设置为VIP用户积分下载,本站未开通任何积分获取方式,即此部分文档无任何获取渠道,仅用于团队内部交流学习,无任何商业用途。
3.文档下载类资源,如您取得权限并下载后发现资源存在问题,请添加官方客服微信处理,以保障您的权益。
1.本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部作品的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
2.为保护部分资料著作权益,此部分文档设置为VIP用户积分下载,本站未开通任何积分获取方式,即此部分文档无任何获取渠道,仅用于团队内部交流学习,无任何商业用途。
3.文档下载类资源,如您取得权限并下载后发现资源存在问题,请添加官方客服微信处理,以保障您的权益。


