

传动比为2的双滑块机构通常通过杠杆原理或几何放大实现,以下是其工作原理的详细分点解释:
1. 基本结构与传动原理
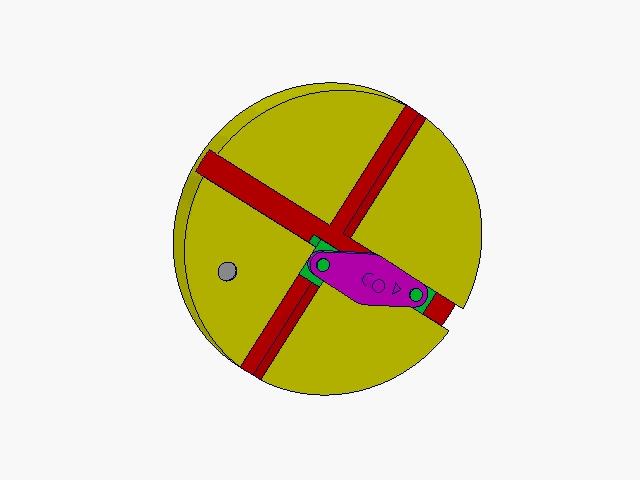
- 机构组成:双滑块机构由两个滑块(输入滑块与输出滑块)、连杆及固定支点(转动副)构成。
- 输入滑块:接受外部驱动(如电机或手动推动)。
- 输出滑块:通过连杆与输入滑块连接,传递放大后的运动。
- 支点位置:作为杠杆的支点,决定传动比。
- 传动比定义:输出位移与输入位移的比值,此处为 2:1,即输入移动1单位,输出移动2单位。
2. 杠杆原理实现传动比
- 力臂比例设计:
- 支点位于输入滑块与输出滑块的连杆之间。
- 输入侧力臂长度为 L,输出侧力臂长度为 2L(如图示)。
- 根据杠杆原理:\text{输出位移} = \text{输入位移} \times \frac{\text{输出力臂}}{\text{入力力臂}} = x \times \frac{2L}{L} = 2x
- 运动传递过程:
- 输入滑块移动距离 x,推动连杆绕支点转动。
- 输出滑块因力臂更长,移动距离 2x,实现传动比2。
3. 几何放大式双滑块机构(无转动副)
- 导轨倾斜角设计:
- 输出滑块导轨与输入导轨成角度 θ,满足 \tanθ = 2(θ ≈ 63.4°)。
- 输入滑块水平移动 x,输出滑块沿斜面移动 y,满足:y = \frac{x}{\sinθ}当 \sinθ = 0.5(即θ=30°),则 y = 2x。
- 运动约束:
- 需通过连杆约束两滑块运动方向,确保几何关系稳定。
4. 动态特性与适用场景
- 匀速传动的限制:
- 杠杆式机构在支点固定时,传动比恒定。
- 导轨倾斜式机构在直线导轨下,仅在小位移范围内近似恒定传动比。
- 应用场景:
- 机械增力装置:如冲压机、夹具。
- 位移放大机构:精密仪器中的微动平台(如显微镜载物台)。
5. 设计注意事项
- 支点强度:杠杆式需确保支点轴承抗磨损能力。
- 导轨精度:倾斜导轨式需高精度加工以减少摩擦误差。
- 材料选择:滑块与导轨间需低摩擦材料(如聚四氟乙烯涂层)。
总结
传动比为2的双滑块机构通过杠杆比例或导轨几何设计实现位移放大。其核心在于合理分配力臂长度或导轨角度,确保输入输出位移的线性比例关系。尽管需处理支点或导轨的精度问题,此类机构在需要简单、紧凑的位移放大场景中具有重要应用价值。
声明:
本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部内容的准确性、完整性,也不构成采购意见,线下交易请自行甄别。
本站资源由网络公开合法途径整理而来,仅为方便用户交流学习使用,但无法保证全部内容的准确性、完整性,也不构成采购意见,线下交易请自行甄别。



 蒙公网安备15040302150625号
蒙公网安备15040302150625号